
A few weeks ago now we started discussing ideas for what our robot might look like. I asked John to come up with some ideas and he was initially enthusiastic about drawing. His idea of a robot does seem to be mostly based around a somewhat boxy but humanoid form (possibly inspired by a favourite bed time story "No-Bot"). John's favourite character to base anything on is the LEGOLAND mascot Ollie the dragon, so that was his second choice.
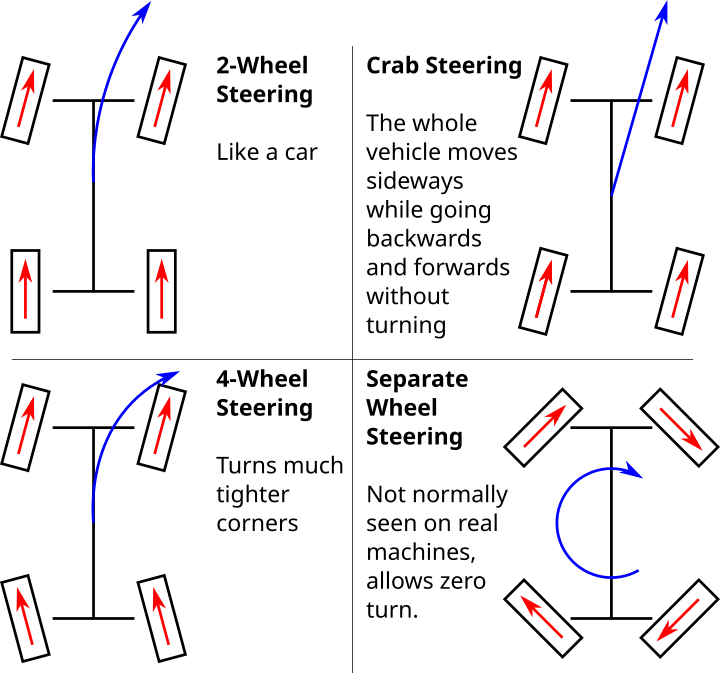
We discussed the need for wheels and that an arm or attachment might be useful. I suggested something like a telehandler which is a practical real-world machine and John's seen on his granddad's farm. The main features I liked about a telehandler were the attachment arm and steering. The attachment arm is a simple and practical design for a mechanical manipulator, much simpler to attach and support than a robot arm more like you find in a factory. Telehandlers typically have very agile steering, they can steer with just 2 wheels, like a car, all 4 wheels making a tight turning circle or can "crab" making them drive diagonally without turning. By tweaking the steering options slightly we can add a fourth "separate wheel steering" option fairly easily, this is not normally used in commercial machinery because you need to reverse the direction of one wheel on each axle which is difficult with a single central engine. With small electric motors attached directly to each wheel reversing one wheel is easy.
There are a couple of other options for steering and wheels we considered. Meccanum wheels are a type of wheel which allow low friction four wheel steering and lateral movement. These are ideal for smooth surfaces but they don't have much grip to go off-roading. Maybe they'd work well for the challenges in PiWars but I'm hoping we'll be able to have some fun with this robot in the garden as well. Skid steer or tracks would give us lots of grip, but they can have unpredictable turning characteristics with 4 wheels, especially on uneven surfaces. One wheel might drag more than another which throws the centre of rotation off. This can make autonomous driving more difficult.
In the first sketch I did of the robot we tried to combine the two ideas, Ollie's somewhat blank face here was intended to be a fitting plate for task specific tools.

So our list of design features so far is:
- Agile steering
- A lifting arm for attachments
- Looks like a red and green dragon