
We realised we needed a way to pick-up toys for the "Tidy up the Toys" challenge. We already had the lift-arm as part of the chassis so a full stacked approach was possible. Initially I just went on Thingiverse and downloaded/printed this claw. I picked it because it looked robust and used the type of servo I had lying around.
In the end no part of that original print actually made it into the competition (even the servo I used got replaced!).
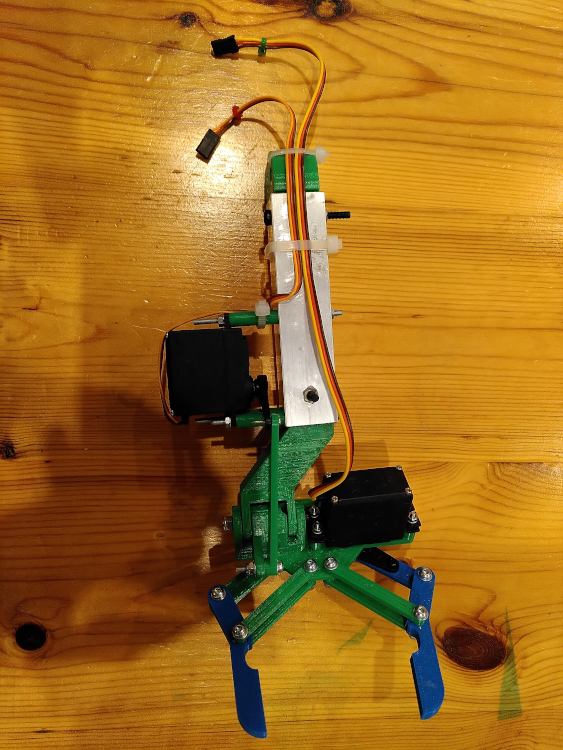
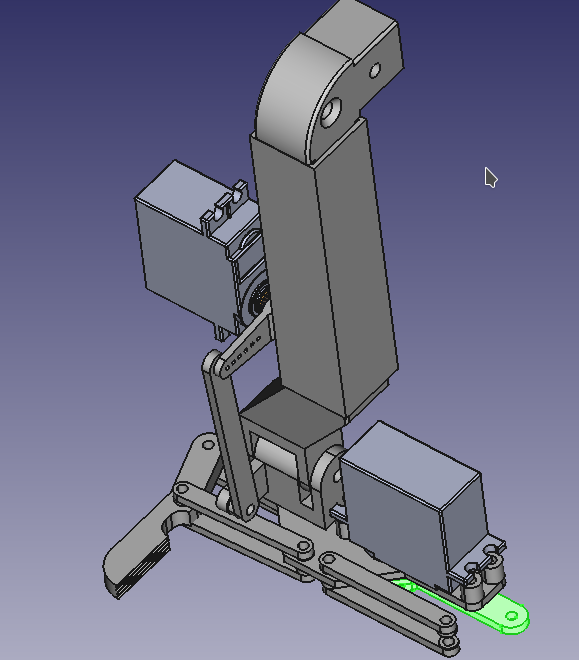
The first thing I changed was the base of the claw mechanism that the servo attaches to, I added a hinge structure and an arm to tilt it with. Then I created an offset hinge mount to attach the tilting mechanism to the end of a piece of tube which was itself attached with another bracket to the lift-arm on the robot. I also created some pillars and a connecting rod to attach a second servo so we could tilt the claw up and down to compensate for the angle of the lift arm.
At this point it actually fitted to the robot and we could test it. It was immediately obvious however that the claw was a very tight fit for the 50mm cubes in the challenge. That's where the second big re-design came in, I replaced the geared arms and all the linkages to make the jaws open wider.
Testing again the last sticking point was the jaws themselves. They had been designed with vertical gripping surfaces, but to pick up the cubes we really wanted something that gripped them horizontally and could make use of the texture of the 3D printed layers to help us hold them. I made a new set of jaws (the last original part replaced!) which had a longer contact surface and had horizontal gripping surfaces instead of vertical.
For software control, we initially just had them follow the position of the joystick on the controls. This was not ideal because it was hard to hold the jaws closed and tilt up/down, or hold the angle constant and open/close the jaws. Instead I created a little bit of code so that moving the joystick up would move the claw up a little every 10th of a second until the joystick went back to the middle position then the claw just stayed. This worked much better and meant once the cube was picked up we could go hands free on that control.