After the initial tests with the new motor it was clear we were going to need a better gearbox solution than my hastily constructed Meccano one. The Meccano gearbox worked for a test but there was significant wear on the brass gear teeth already and a sparkly layer of brass dust over the battery. The couplings weren't balanced enough since they were using full size bolts instead of grub screws which was causing very high vibration causing other bolts to come loose.
I started searching for options and once again the RC market proved the best value for this kind of thing. I found what we wanted was probably a "Crawler" gearbox for 1/10 scale cars. This should fit our motor and drive a 5mm axle. If you were to buy one of these 4x4 Crawler cars you'd obviously get a gearbox with it so the only ones available were upgrade or second hand parts. Ideally I wanted the option to buy again in case we wanted to go for dual drive or needed a replacement which ruled out most of the second hand ones. Frustratingly most of these RC parts at best come with a list of compatible chassis, never proper drawings and documentation. In the end I picked this one from Amazon as a likely good bet.
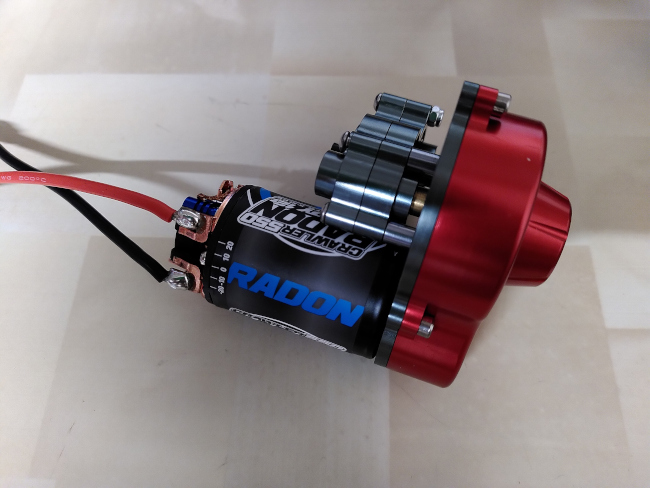
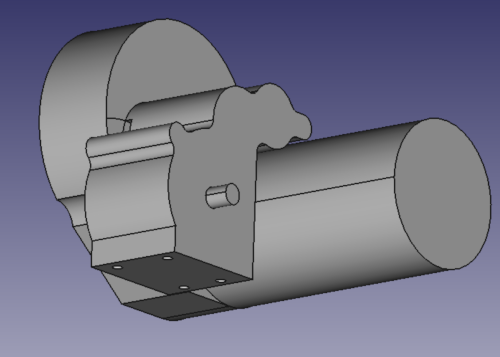
It went together with the motor very easily using the provided screws and is a little noisier than I'd hoped but works well enough. One of the first things I did was to make a model of it in FreeCAD to help integrate it into the chassis.
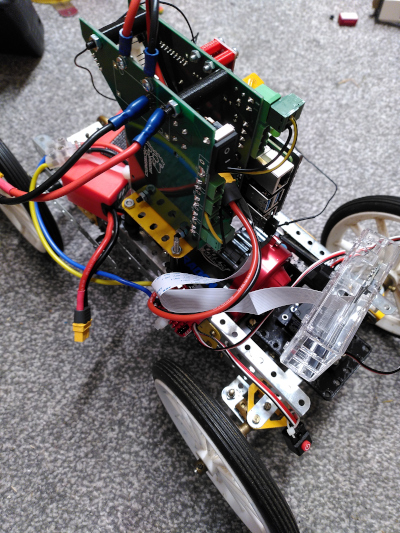
Next I hacked it into the chassis we had, managing to find a Meccano hole close enough to bolt it down with the M3 threaded mounting points and using a pair of universal joints to match up the drive shafts. Again the chassis was way over powered for the thin wheels but it was driving nicely.