
We've already discussed what motors we're using. These motors need some fairly hefty speed control, they have a stall current of 3.4A. They've also got magnetic encoders which means we need real-time encoder monitoring ability. Real-time stuff on the Pi is challenging, and monitoring 4 quadrature encoders with one …
Articles tagged with Motors
Motors
Obviously we need motors for our robot. The easiest option is to buy motors with a reduction gearbox already attached. This will reduce the speed but increase the torque (how "strong" the motor is).
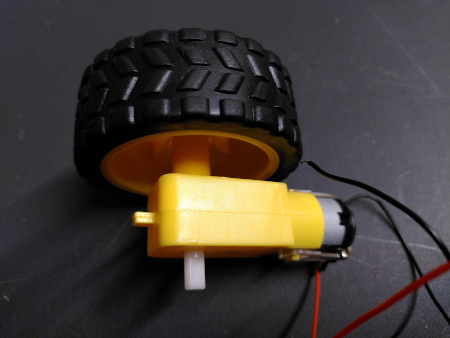
One common and cheap option for motors, a bit small for my ambitions. There are a …