
Our videos are all submitted now. We managed to fit in filming all the challenges (thanks to my parents for their help). Time to look at the robot and the process and see what we've learned.
1. Read the rules all the time
I'd read through the rules initially but that's a long time ago now. As we were preparing the challenges we came across things we'd not realised would be issues, and details of the challenges that we could have designed around better if we'd remembered those details whilst designing the robot. Things like our wheel issue could have been avoided by keeping the rules more in mind. We ended up with a massive and complex telescoping arm which we didn't extend because of the limitations on size as well. Partly this was deliberate, it was the first robot I've designed since I left school and it was just fun to make it big and complicated but as the deadline drew nearer a little more focus would have helped.
2. The arena is a project itself
I'd thought we needed some time to make the arena, actually by the time you've made it and then taped-out all the challenges it makes up a significant amount of work. This wouldn't have been an issue if it was a normal competition and everyone was sharing one arena. You'd still need somewhere to practice though! It might have been helpful to make the arena earlier on so we could do more practicing in the actual space. It's hard to live with most of the kitchen floor taken up with a robot arena though...
3. Chip shortages are bad for robots
We nearly didn't have a working attachment because of parts shortages. I had got enough parts in to build the four drive motor boards and the main controller board back at the end of 2020 when things were still normal. Coming to add the controllers for the arm in May and I realised I had no H-Bridge boards and was short on a couple of other parts. I managed to find just a few of the H-Bridge boards left in stock at RS and ordered them in. I ended up having to use a 5V RS485 driver for one of the boards, adding a 1k resistor to protect the STM32G0. Thankfully I'd ordered 10 of the microcontroller in the initial order or we'd have had no way to populate more boards!

4. Cheap servos aren't worth the time
As I mentioned in Catch Up the cheap servos I got of eBay were rubbish. Out of the 4 I got, there were 3 distinct types, one actually had metal gears it turned out and went on to be the tilt controller in the claw, the other two varieties both had plastic gears which were useless. As soon as the servo was stalled (by grabbing a cube for example) it ripped the teeth of the last plastic gear to shreds. I wasted money on them initially then when working on the claw add-on I wasted more time thinking they could probably cope with light duties, they really couldn't.
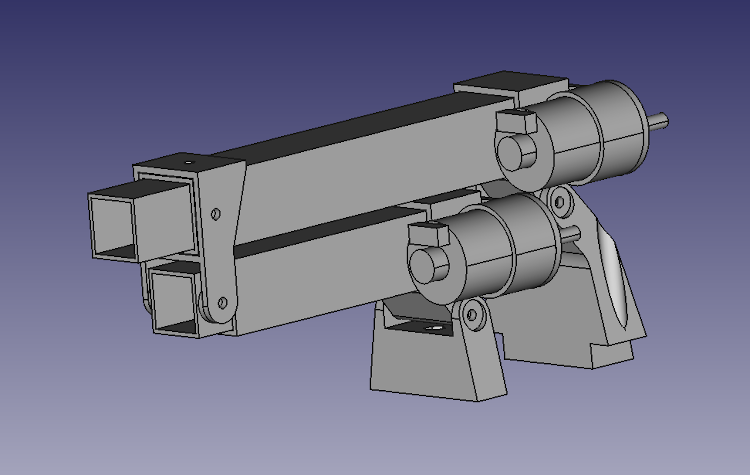
5. Geometry is hard
The lift-arm was a challenge. I've not written much about it because it was a bit of a rush to complete, but it was all designed from scratch using just some square section aluminium from eBay and some motors and threaded rods I had lying around and a few printed brackets. Initially I'd been planning on using some tiny N20 gear motors inside the tubes to drive this lift arm. I'm glad I didn't pursue that approach because torque was a major issue for the lift arm. Especially with heavy attachments like our Nerf gun the arm just didn't want to lift. Sometimes the motor would stall, sometimes the belt would actually slip. The force applied to lifting the arm is only a fraction of the force the motor applies to the linear actuator since it's at an angle. In fact, in my design when it's completely flat there's technically no force directly pushing the arm up. There's a lot more engineering knowledge that goes into the design of hydraulic systems for diggers and machinery than I'd realised!
6. Building robots is still fun!
I'd not built a robot since I was at school, I used to do it quite often back then. Building them and designing their systems is still great fun and the range of parts easily available at a budget price these days is incredible. As a comparison I found a motor I'd used for similar power/weight robots when I last built one and the motor on its own is the same size as the whole motor and gearbox assembly we used here. I remember a friend who did robotics and RC car racing showing me one of the amazing new 10kg servos (like the ones we used for steering on our robot) but it cost about 5 times what we paid for our genuine TowerPro parts. I've also finally put my 3D printer to use for the thing I wanted a 3D printer for, building robots. I've had the RepRap for about a decade and after a somewhat rocky start I patched it up just before starting on our PiWars entry. Since then it's printed several kilos of PLA and PETG filament and made parts for toys, work and of course the robot.